激光雷达及InSAR干涉测量虚拟实验平台是在虚拟环境下培养学生遥感非图像数据处理技能的仿真教学项目,主要面向学院地理信息科学、地理科学和测绘工程专业。该平台以点云数据及卫星影像数据为基础,通过遥感应用教学团队,依据项目实验的具体目标,将遥感非图像数据处理与信息深度挖掘以虚拟仿真方式运用到实践教学。学生在虚拟实验平台上不仅能完成遥感非图像处理的基础应用技能等基础实践教学内容,并能结合学院产学研项目与科研课题,从地面沉降监测、点云数据三维建模等应用层面进行遥感动态监测与模拟,其综合性实验项目,将提高实践教学的层次,促进学生对遥感非图像处理技能的掌握。
实验项目:
基础实验:SAR图像配准;SAR图像滤波;地理编码和辐射定标;SAR相位解缠;ICP点云配准;点云滤波;点云特征点提取;点云分割。
综合实验:DInSAR干涉测量提取地震形变信息实验;SBAS方法进行地表形变信息提取实验;PS-InSAR提取地面沉降监测信息实验;三维激光点云数据分割实验。
|
|
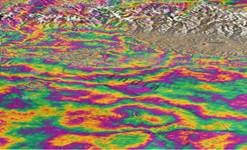
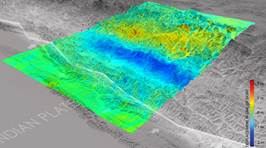
图2-88 两轨影像生成的干涉图图2-89 地震形变区域监测结果
|
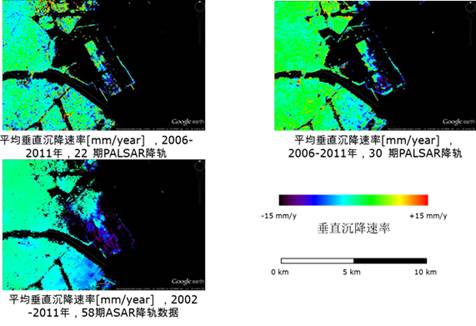
图2-90 SBAS方法获取的地面沉降结果
|
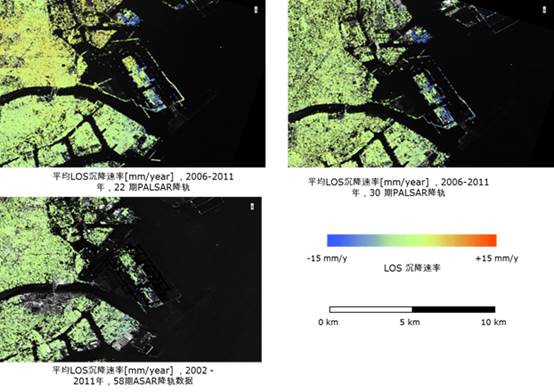
图2-91 PS方法获取的地面沉降结果
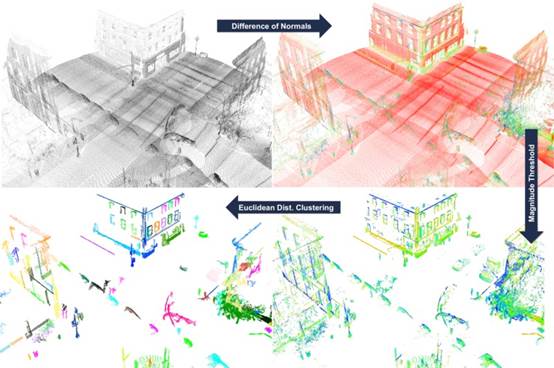
图2-92 基于法向差异的点云分割
实验效果:
通过该虚拟平台,学生从影像配准、图像滤波、地理编码及辐射定标、ICP点云配准、点云滤波、点云特征点提取、点云分割等方面全方位掌握了遥感非图像数据处理技术;通过虚拟仿真环境,学生能够从宏观到微观全方位的了解激光雷达及InSAR干涉测量技术在地震监测、地面沉降监测等方面的应用。
实验流程:
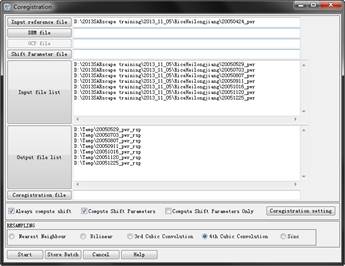
SAR图像配准
覆盖同一地区的多幅雷达影像,如要进行时间序列分析、动态监测、多时相滤波处理等,需要进行图像间的配准处理。配准处理要求是斜距几何,并且各个图像采用相同的接收几何。
|
图2-93 图像配准界面设置
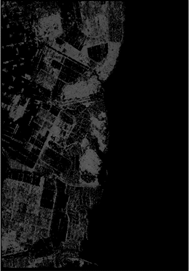
SAR图像滤波
斑点类似噪音信号特征,一般产生于相干系统,比如SAR和激光雷达系统。表现为随机的“椒盐”散落在图像上。在InSAR处理过程中,从SAR数据中生成的干涉图往往会伴随一些噪声,可通过空间滤波的方式减少这些噪声影响,有助于后期提高干涉条纹的清晰度。
|
|
图2-94 滤波前图2-95 滤波后
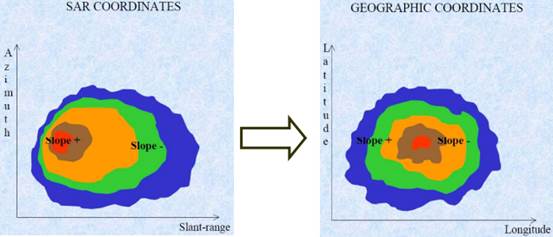
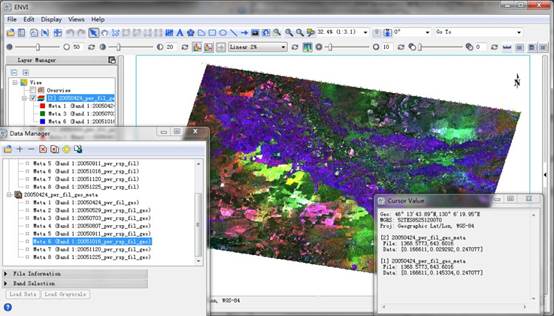
地理编码和辐射定标
SAR系统观测到的是电磁波入射地球表面后反射(后向散射)的雷达脉冲的强度和相位信息。这个信息编码到雷达坐标系统下,即斜距坐标系,被记录下来。在一些应用中,需要将SAR数据从斜距坐标系转到地理坐标系。这个过程就是SAR数据的地理编码(Geocoding)。为了对比不同的传感器获取的同一区域影像、或者同一传感器以不同的工作模式获取的影像、或者同一传感器不同时相的数据,需要定标为后向散射值。
|
图2-96 SAR地理编码示意图
|
图2-97 SAR地理编码及定标后的结果
SAR相位解缠
相位解缠是时序InSAR 数据处理流程中重要环节之一,也是主要的误差来源。相位解缠的精度直接影响到获取地表形变信息的精确程度。相位的变化是以2π为周期的,所以只要相位变化超过了2π,相位就会重新开始和循环。相位解缠是对去平和滤波后的相位进行解缠处理,使之与线性变化的地形信息对应,解决2π模糊的问题。
|
|
图2-98 MCF及Delaunary MCF解缠效果对比
ICP点云配准
ICP点云配准是指利用ICP算法将不同姿态下获取的3D点云数据对准到一个完整的数据场景中,使得不同点云数据之间的重合区域完全重叠。该实验包括两个核心环节:一是基于ICP算法实现两个不同点云数据的配准;二是序列点云的递增配准。基于ICP算法的点云配准基本流程为:首先从两个点云数据集中提取兴趣点(关键点),然后计算每个关键点的特征描述符,并根据特征描述符的相似性以及三维空间位置关系估计点对点关系,依据对应关系估算刚体变换矩阵,最后不断重复上述步骤直到配准结果满足精度需求。
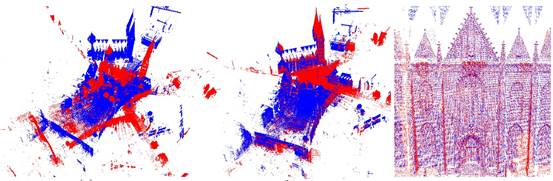
图2-99 成对点云配准结果

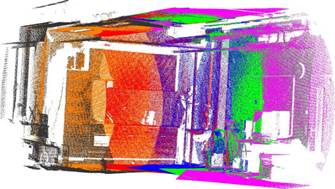
图2-100 序列点云递增配准结果
点云滤波
原始点云数据在数据采集时因为环境、采集仪器等影响会产生离群点、异常点以及噪声数据,点云滤波是指通过滤波算法将这些噪声数据剔除。常见的点云滤波方法主要有直通滤波器、体素格滤波器、统计滤波器、半径滤波器等。直通滤波器主要针对使用线结构光扫描的方式采集点云;体素格滤波器通过向下采样的方式而不破坏点云本身几何结构的功能;统计滤波器通过计算每个点到其最近的k个点平均距离去除明显离群点;半径滤波器通过判断以某点为中心的圆内点数来剔除离群点。

图2-101 点云滤波前后结果图
点云特征提取
点云特征是描述点在其局部范围空间和位置上的差异程度,通过提取少量具有典型特征的点不但可以快速推断出对象的表面几何形状,更能够为点云配准、对象识别等提供技术支撑。对点云特征的描述方式称为点云特征描述子,特征描述子的基本思想是对点云数据集中的每个点构建局部坐标系,通过该点与其局部范围内邻域点之间的位置关系进行描述,目前常见的描述子包括:法向、曲率、点特征直方图、快速点特征直方图、旋转图像等。

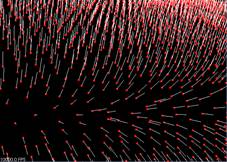
图2-102 不同搜索半径下法向提取结果

图2-103 不同位置的快速点特征直方图
点云分割
点云分割是按照特定的分割算法将点云数据拆分成细小的对象,每一个对象内所有的点具有相同的特征。点云分割是点云分类以及三维建模等应用的重要前提,同时也可以作为提取特定要素的重要依据,例如地面点提取、独立机动车等。点云分割算法主要有:聚类分割、区域增长分割、基于最小值的分割等。
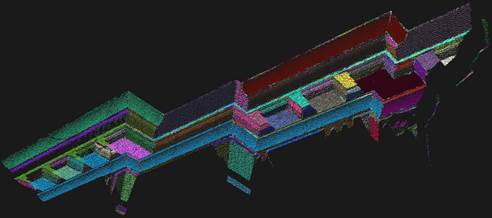
图2-104 基于区域增长法的点云分割

图2-105 基于条件欧几里得聚类的点云分割