无人机摄影测量虚拟仿真实验平台是在虚拟环境下培养学生空间数据采集的仿真教学项目,主要面向学院地理信息科学、地理科学和测绘工程专业。该平台以测绘无人机、室内地形地貌沙盘和数字摄影测量工作站为基础,模拟实际航空摄影测量及4D产品生产,设计了航线规划、飞行模拟、相机操控、数据处理软件使用、4D数据产品生产等实验内容,教授学生从遥感平台飞行航线规划到最终数据采集入库的完整技术流程。学生在该平台上不仅掌握了基本的空间数据采集技能,同时结合学院科研项目,开展了无人机航测空间数据快速采集和处理、无人机对考古地形构建、无人机对经济林监测等综合性实验,发掘了空间数据采集教学深度,提升了学生的技能水平。
实验项目:
基础实验:无人机飞行模拟;无人机航线规划;相机操控;ImageResample影像预处理;Geolord-AT空中三角测量;JX4G影像立体测图;JX4G数字高程模型生产;JX4G正射影像生产;City3DBrowser三维地形构建;DpGrid影像预处理;DpGrid空中三角测量;DpGrid数字高程模型生产;DpGrid正射影像生产; VirtuoZo数据预处理;VirtuoZo建立模型;VirtuoZo生成等高线、数字高程模型和正射影像;VirtuoZo立体测图。
综合实验:无人机航测数据快速采集和处理;基于无人机的园区测绘;基于无人机的考古地形构建;基于无人机的经济林生长监测等。
| |
图2-1 室内地形地貌沙盘效果图 | |
DEM:数字地面(高程)模型 |
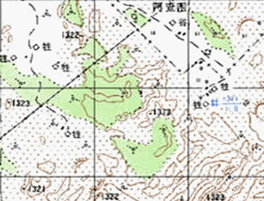
DRG:数字删格地图 |
DLG:数字线划(矢量)图 |
DOM:数字正射影像模型 |
图2-2 摄影测量数据采集产品 | |
实验效果:
通过无人机摄影测量虚拟仿真实验平台,学生从无人机飞行模拟、航线规划、相机操控、软件操作等方面掌握了摄影测量空间数据采集技能。通过该仿真平台,学生可将掌握的摄影测量空间数据采集方法应用到林业、国土、考古等领域,巩固了学生的各类空间数据采集技能,拓展了学生的知识面。
实验流程:
无人机飞行模拟
飞行模拟是无人机实验的重要组成部分,利用Reflex软件进行无人机飞行的模拟,这个软件是目前国内仿真程度堆高、设置最简单的遥控飞行模拟器,可以直接连接电脑和遥控器,可以设置多种机型和环境,功能强大。在Reflex软件中选择合适的机型,软件提供了丰富的机型可供选择,同时还可以改变飞机的重量。设置飞行的环境因素,包括气候条件和风向、风速等。设置飞行的场景和环境,是标准的训练场地还是野外场地,有没有引导线和边界等。设置遥控飞行的控制键,就是将遥控器的按键与飞机的机翼、马达的控制连接起来,达到控制飞机的目的。最终在完成以上设置之后,可以在软件中掌握飞行的控制技巧。
|
|
图2-3模拟飞行效果 | 图2-4 环境设置 |
|
|
图2-5 模型选择 | 图2-6 控制键设置 |
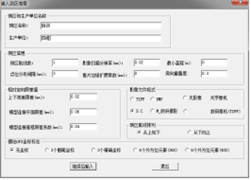
航线规划
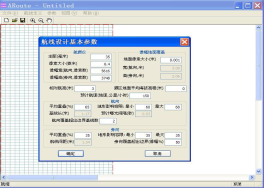
当利用航摄仪进行数据采集时,需要对航线进行规划,同时确定地图的成图比例尺,通过比例尺确定航拍分辨率,航拍分辨率由飞机航线、相机镜头、相机相幅等共同确定。因此,航线规划实验首先研究测区地形,据此计算航线的航高、航线间距及拍照的空间间隔,确保各航片之间的航向重叠率在65%,旁向重叠率在35%,最后利用模拟地面站系统的航线设定工具进行航线规划。
|
|
图2-7航线设计基本参数设置 | 图2-8 航摄仪航线规划 |
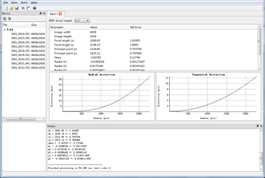
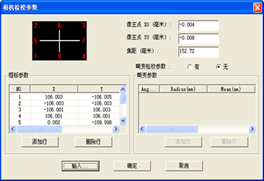
相机操控
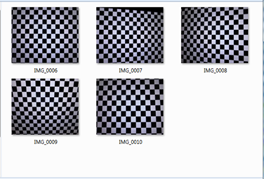
航摄仪搭载平台通常其体积较小,无法搭载传统航摄相机,只能用普通数码相机替代。但普通数码相机其镜头素质和相机素质和航摄相机差距较大,因此在航拍之前,需要对数码相机进行检校和参数设定。首先利用电脑屏幕生成棋盘格检校盘,然后从上、下、左、右、垂直五个方向上拍摄照片,照片中要布满棋盘格,将拍摄的照片利用Australis软件进行检校,得到检校参数,这些检校参数会在后期数据处理中使用到,最后根据天气条件设定相机的ISO等参数。
|
| |
图2-10拍摄检校图片 | 图2-11相机检校 | |
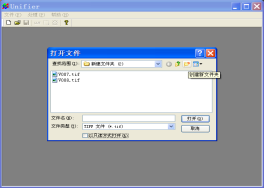
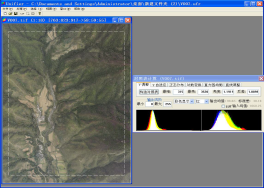
影像预处理
航空摄影获得的原始数据需要经过一定的预处理才能开始数据产品的制作,预处理主要包括两部分内容,分别为畸变差纠正和匀光匀色处理。畸变差纠正需利用ImageResample软件,选择.txt 格式相机文件,选择输出文件夹,导入需要纠正的影像即可。影像匀光匀色利用的是Unifier软件,打开影像后对 r调整,对红、绿蓝及全色通道分别进行其亮度和反差值,使影像达到处理时所需要求。
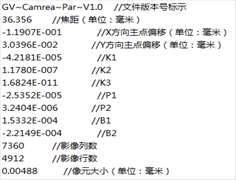
图2-12 .txt 格式相机文件
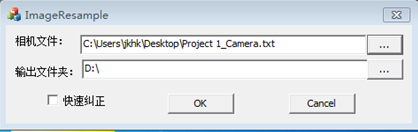
图2-13 畸变差纠正
|
|
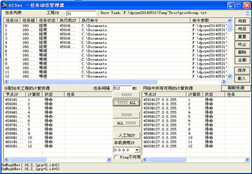
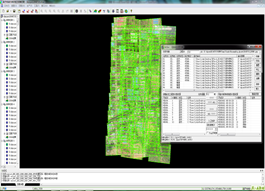
Geolord-AT空中三角测量
空中三角测量的主要任务就是为图工序提供大控制点外坐标以及提供内业测图所需的各种定向数据和其他一系列副产品。空中三角测量是摄影生产的关键步骤,它利用少地面控制点来计算测区中所有影像的外方位元素和加密点地面坐标,是后续一系列摄影侧向处理与应用的基础。Geolord-AT软件在建立工程后,通过三大定向(内定向、相对定向和绝对定向)后,利用少量的控制点坐标,进行区域网平差,求解连接点的大地坐标与影像外方位元素。
图2-16 创建测区 |
图2-17 航线信息 | |
图2-18内定向 |
图2-19相对定向 | |
图2-20绝对定向 |
图2-21平差检查 | |
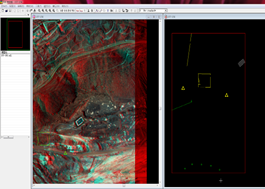
JX4G影像立体测图
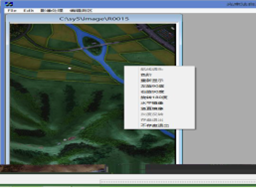
立体测图本质是将地面点转换为模型,导入到测图界面进行测图。立体测图的产品是航空摄影4D数字产品最重要的数字线化图DLG,是可视化的仿真产品。基于DLG可以制作地形图、专题图以及正射影像图等。在JX4D摄影测量工作站中可以直接使用空三成果,先对原始影像进行定向生成立体像对后就可以进行矢量测图。
图2-22地物测图 |
图2-23地貌测图 |
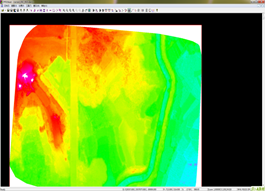
JX4G数字高程模型生产
在JX4G中,利用空中三角测量结果,调用匹配生成的点云数据提取数字高程模型,设置好模型需要的航片点云,确定匹配窗口的大小以及模型的分辨率,然后根据航带设置自动排列地物点云,并生成每张航片的数字高程模型,最后将航片进行拼接,得到全测区数字高程模型。
|
|
图2-24 单航片DEM | 图2-25 精细匹配DEM |
|
|
图2-26 全区DEM | 图2-27 三维景观DEM |
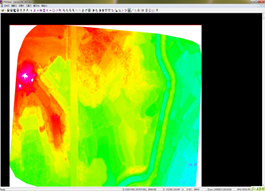
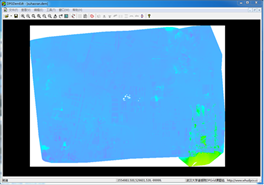
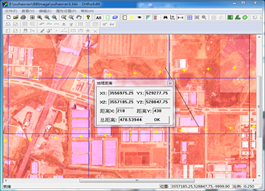
JX4G正射影像生产
在构建完数字高程模型后,利用原始影像和数字高程模型,在虚拟环境下生产数字正射影像。要生成正射影像简单来说有两个步骤,第一步进行正射纠正,第二步进行拼接匀光,将所有的影像都拼接好后就是一幅完整的数字正射影像。
|
|
图2-28 正射纠正 | 图2-29 匀光匀色 |
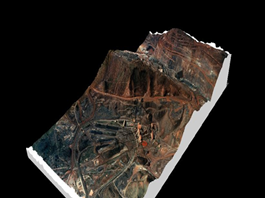
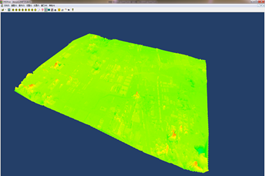
City3DBrowser三维地形构建
在City3DBrowser中,当调入地面模型相关数据、地面纹理、房屋模型数据和点目标等数据,可自动构建被摄地区的三维地形,一旦保存好数据路径后,在以后浏览三维场景时,无需依次调用所有数据,直接打开保存好的三维工程文件,所有数据将被全部调出。

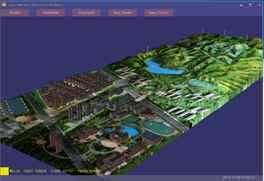
图2-30读取DEM文件数据图2-31三维地形
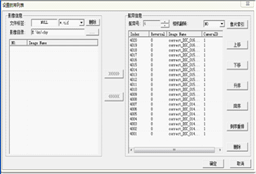
DpGrid影像预处理
航空摄影获得的原始数据需要经过一定的预处理才能开始数据产品的制作,预处理主要步骤为参数设置、航带设置、数据预处理。其中参数设置是在建立测区工程文件后,设置工程参数、相机参数、控制参数。航空影像的航带划分和排列参考飞行控制系统记录的每张航片的POS文件,然后在DpGrid中运行排列航带的工具从而来完成航带排列,数据预处理的结果是通过影像的内定向、旋转等操作从而形成测区的金字塔和快视图。
|
|
图2-32 影像航带排列 | 图2-33 调用处理节点 |
|
|
图2-34 生成快视图 | 图2-35 匹配点编辑 |
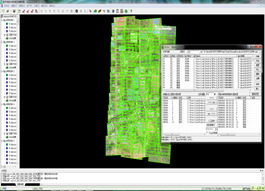
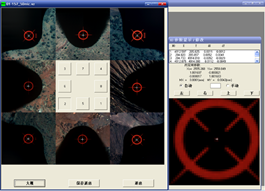
DpGrid空中三角测量
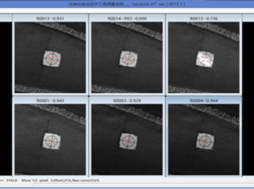
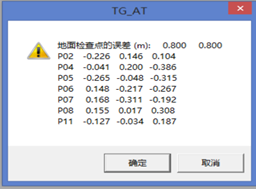
空中三角测量包括自由网平差和控制网平差两部分内容。由于现实地物的复杂性,影像预处理后自动匹配会出现很多错误的匹配点,匹配点是按照误差大小从上到下进行排序。因此,可以从上到下依次进行人工编辑,对于误差过大或偏离程度较大的匹配点可以删除,在人工微调后,进行平差处理。如此反复操作,直到自由网平差通过为止。控制网平差要手工添加通过外业测量采集的控制点,人工添加控制点,要选择对应的位置,减少误差,从而提高作业的精度。最后通过交互式编辑是对自由匹配出现的错误进行人工编辑,对误差较大的匹配点进行人工调整,微调匹配点在各张影像上的位置,使其能够精确配准。
|
|
图2-36 自由网平差 | 图2-37 添加控制点 |
|
|
图2-38 控制网平差 | 图2-39 人工交互编辑 |
DpGrid数字高程模型生产
利用空中三角测量结果,调用匹配生成的点云数据提取数字高程模型,在DpGrid中设置好模型需要的航片点云,确定匹配窗口的大小以及模型的分辨率,然后根据航带设置自动排列地物点云,并生成每张航片的数字高程模型,最后将航片进行拼接,得到全测区数字高程模型。
|
|
图2-40单航片DEM | 图2-41 精细匹配DEM |
|
|
图2-42 全区DEM | 图2-43 三维景观DEM |
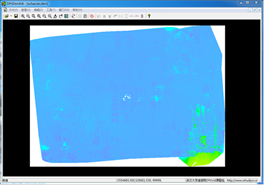
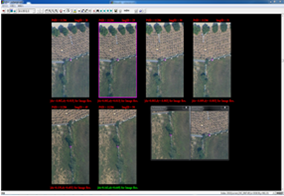
DpGrid正射影像生产
在构建完数字高程模型后,利用原始影像和数字高程模型,在虚拟环境下生产数字正射影像,数字正射影像的实验通过设置拼接参数、匀光匀色底图、分幅参数、纠正参数,导入DEM数据、原始航片数据、输出文件路径等步骤完成正射影像的生产。
|
|
图2-44 DOM编辑 | 图2-45 精细DOM |
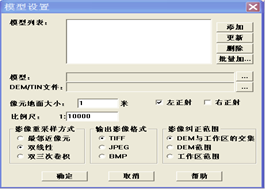
VirtuoZo数据预处理
立体模型是空间数据虚拟采集的重要组成,VirtuoZo对相互重叠的两张航片建立立体模型,并进行单模型航片的数字高程模型、数字正射影像的生产。在数据生产前需要对数据进行预处理,数据预处理的实验步骤包括工程建立、相机参数设置、影像参数设置、模型参数设置等,通过上述步骤完成影像数据的预处理。
|
|
图2-46 设置测区参数 | 图2-47 设置相机参数 |
|
|
图2-48 输入影像 | 图2-49 设置模型参数 |
VirtuoZo模型建立
VirtuoZo模型建立主要是经过内定向、相对定向、绝对定向以及精度调整,最后进行特征匹配和核线提取。其中内定向通过创建影像扫描的坐标同像点的坐标之间的转换关系从而获得转换参数,目的是将像片纠正到像片坐标这样就可以消除像片因扫描、压平等原因所导致的变形。相对定向是通过同名像点来计算出两相邻影像的位置关系,在实验过程中,VirtuoZo可以自动识别左、右相片上的同名点,并进行百个同名点的匹配,从而自动完成模型的相对定向。对于误差较大的定向点进行手动删除或者是对同名点的点位进行手动调整,继而达到目标精度。绝对定向的实验步骤是在获取完整的地面控制点和内业加密点所对应的像点坐标之后,解算模型的外方位元素,并将获取的坐标融入到大地坐标系中去,通过上述步骤完成VirtuoZo模型的建立。
|
|
图2-50 内定向 | 图2-51 相对定向 |
|
|
图2-52 立体绝对定向 | 图2-53立体模型 |
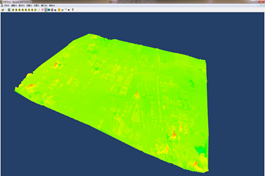
VirtuoZo生成等高线和正射影像
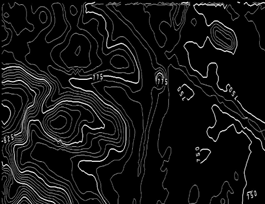
在完成上述测区建立、模型定向、影像匹配等所有实验后,在视差数据、成果参数和自定义参数等基础上,生成测区的DEM。VirtuoZo DEM生成实验通过DEMMaker模块,利用特征点、线、面来构成TIN后内插最后生成DEM,也可以利用匹配的结果直接生成地面高程模型;当构建的DEM基础上,通过单模型DEM生成该模型的正射影像、等高线以及等高线叠合的正射影像。
|
|
图2-54自动提取等高线 | 图2-55 生产正射影像 |
|
|
图2-56 等高线叠合正射影像 | 图2-57 数字高程模型 |
|
|
图2-58立体图 | 图2-59 透视图 |
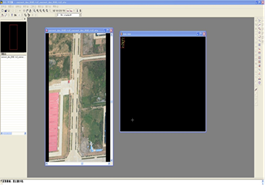
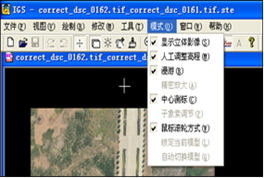
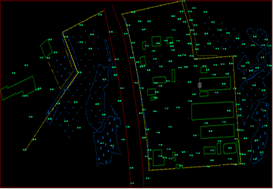
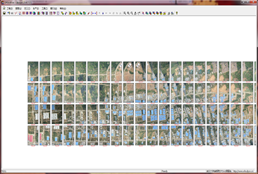
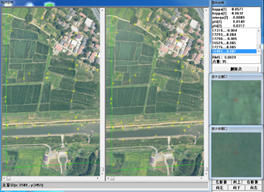
VirtuoZo立体测图
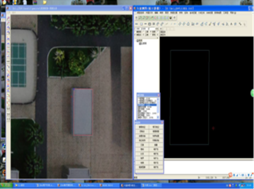
立体测图本质是将地面点转换为模型,导入到测图界面进行测图。立体测图的产品是航空摄影4D数字产品最重要的数字线化图DLG,是可视化的仿真产品。基于DLG可以制作地形图、专题图以及正射影像图等。VirtuoZo立体测图实验通过调用IGS测图模块,新建矢量文件,设置相应的参数和坐标范围,随后加载立体模型,则工作区会出现立体模型窗口和对应的适量绘图窗口。接着进行作业环境设置,可以选择鼠标键盘或手轮脚盘两种作业方式,作业方式确定后,打开地图符号系统模块,根据实际地物(如建筑、道路、草地等)选择对应的符号,将光标定位到地物所在处即可开始地物采集,直到所有地物采集完毕保存矢量文件并关闭测图模块。
|
|
图2-60 加载立体模型 | 图2-61 作业环境设置 |
|
|
图2-62 数据采集 | 图2-63 测图结果 |


















![S(`TJVCVC[Y)N[KG3ND]`DR](/_upload/article/images/68/75/7959499045f9a9dbd46e3eff43da/9099c9e3-7a47-474f-a7c5-36b560fddb7d.png)
![L`G6B3139D90)4FA9K]3BXG](/_upload/article/images/68/75/7959499045f9a9dbd46e3eff43da/98cbfe3a-ae47-4288-b31a-0ae2e533aec1.png)